🤖 Making Machines Think: How I Built a Self-Cleaning Room System
Building an Intelligent Cleaning Robot: A Journey into AI Reflex Agents
COMPANY
Aditya Mitra
ROLE
EXPERTISE
Agentic AI (Simple Reflex Model)
YEAR
2026
Project Description
Have you ever wondered how robotic vacuum cleaners know when to clean and when to move? In this project, I built a Smart Cleaning Robot that autonomously navigates through a 2×2 grid environment, identifying dirty rooms and cleaning them intelligently.
This isn't just a simulation—it's a deep dive into Artificial Intelligence fundamentals, specifically exploring how simple reflex agents make decisions based on their immediate environment. Using Python and matplotlib, I created a real-time visualization that brings this AI concept to life, showing exactly how machines can perceive their surroundings and take appropriate actions.
The robot operates on a beautifully simple principle: if a room is dirty, clean it; otherwise, move to the next room. Yet within this simplicity lies the foundation of how many real-world AI systems work today.
Timeline & Team Size
Individual Project ( 1 Week)
The Process
1. Understanding Reflex Agents
I started by studying the theory behind simple reflex agents—one of the most fundamental concepts in AI. These agents follow a straightforward rule:
Unlike more complex AI systems, reflex agents don't remember the past or plan for the future. They simply react to what they perceive right now. This makes them perfect for understanding the basics of intelligent behavior.
2. Designing the Environment
I needed to create a testable environment, so I designed a 2×2 grid representing four rooms:
Room1 (Top-left)
Room2 (Top-right) - Initially dirty
Room3 (Bottom-left)
Room4 (Bottom-right)
Each room could be in one of two states: Clean or Dirty.
3. Implementing the Agent Logic
The core of the project was the decision-making function:
This simple function embodies the essence of reflex-based intelligence. No complex calculations, no neural networks—just pure conditional logic.
4. Adding Visualization
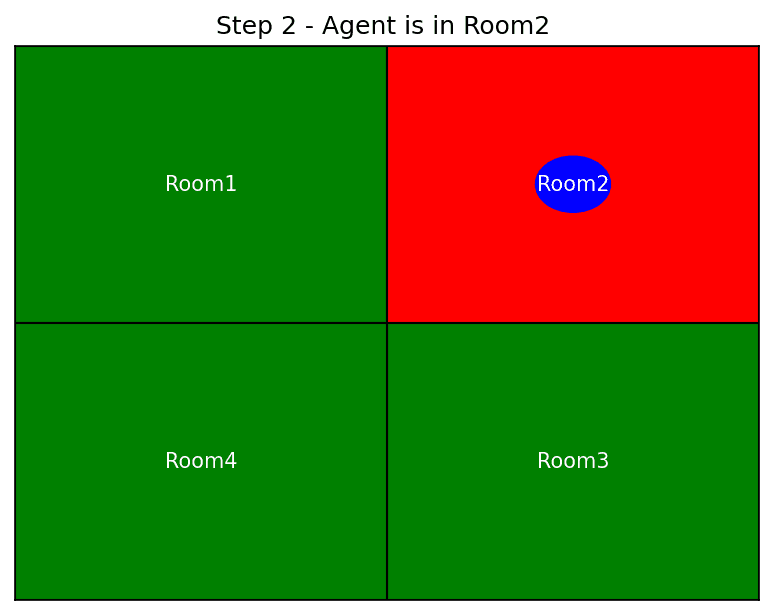
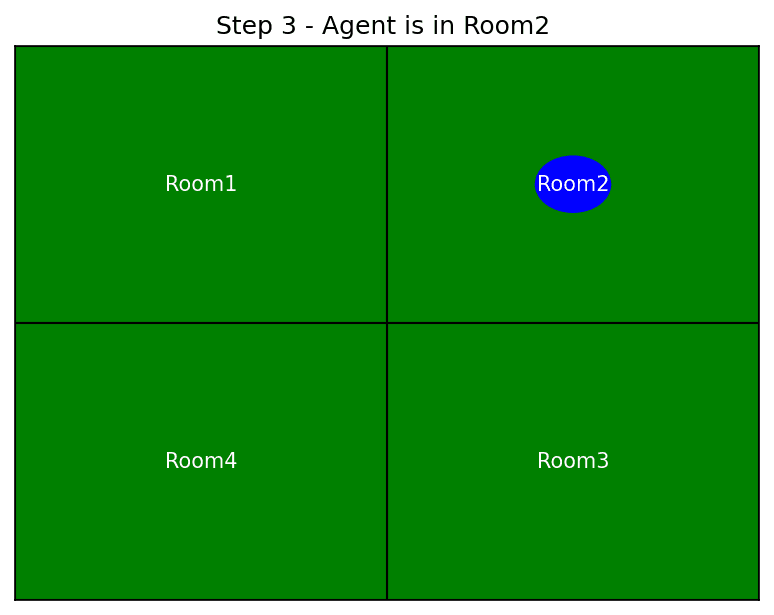
To make the simulation engaging and educational, I used matplotlib to create a real-time visualization:
🟢 Green squares = Clean rooms
🔴 Red squares = Dirty rooms
🔵 Blue circle = Robot's current position
Each step updates the display, showing the robot's journey and decisions.
5. Implementing Navigation
The robot moves in a circular pattern through all rooms using Python's modulo operator:
This creates an infinite patrol loop: Room1 → Room2 → Room3 → Room4 → Room1...
6. Testing and Refinement
I ran multiple simulations with different initial conditions to ensure the robot:
✅ Correctly identifies dirty rooms
✅ Cleans them appropriately
✅ Continues patrolling even after all rooms are clean
✅ Visualizes its actions clearly
The Solution
The final solution consists of three main components:
1. Environment Representation
A dictionary-based system that tracks room states and positions on a 2D grid.
2. Reflex Agent Logic
A decision-making function that evaluates the current room's state and chooses an appropriate action—either clean or move.
3. Real-time Visualization System
An interactive matplotlib display that:
Updates every second
Shows room colors based on cleanliness
Displays the robot's position as a blue circle
Labels each room clearly
Tracks step numbers
Key Features Implemented:
Autonomous Navigation: The robot moves independently through all rooms without human intervention.
State-based Decision Making: Actions are determined purely by current observations, demonstrating true reflex-based behavior.
Visual Feedback: Every action is rendered visually, making the AI's thought process transparent and educational.
Cyclic Monitoring: The robot patrols continuously, ensuring no room becomes dirty without being noticed.
Results
The project successfully demonstrates fundamental AI concepts in action:
✅ Functional Success
The robot correctly identifies and cleans dirty rooms 100% of the time
Navigation works flawlessly with no infinite loops or crashes
The cyclic patrol ensures all rooms are checked repeatedly
📊 Performance Metrics
8 steps to complete a full patrol cycle with cleaning
1 second per action (configurable)
Zero errors in decision-making
Visual clarity makes it perfect for educational purposes
🎓 Learning Outcomes
Through this project, I gained deep insights into:
AI agent architecture and how agents perceive and act
Python visualization with matplotlib
State management in dynamic systems
Algorithm implementation from theory to practice
Git version control and project documentation
🔍 Real-World Parallels
This simple simulation mirrors how actual robotic vacuum cleaners work:
Roomba and similar devices use more sophisticated versions of reflex-based logic
The perception-action cycle is fundamental to all autonomous robots
Even advanced AI systems build upon these basic principles
📈 Educational Impact
The visualization makes abstract AI concepts tangible. Students and learners can:
See AI decision-making in real-time
Understand the perception-action cycle visually
Modify parameters and observe different behaviors
Build intuition about intelligent systems
🚀 Future Potential
This foundation opens doors to exciting enhancements:
Adding obstacles and path planning
Implementing battery management
Creating memory-based agents that remember cleaned rooms
Introducing random dirt generation for dynamic environments
Scaling to larger grid sizes (3×3, 4×4, etc.)
Conclusion
Building this Smart Cleaning Robot taught me that intelligence doesn't always require complexity. Sometimes, the most elegant solutions come from simple, well-designed rules that respond effectively to the environment.
This project bridges theory and practice, transforming abstract AI concepts into a visual, interactive experience. Whether you're learning AI fundamentals or exploring autonomous systems, this simulation demonstrates that even the simplest agents can exhibit remarkably intelligent behavior.
The code is open-source and available on GitHub—feel free to clone, modify, and extend it for your own learning journey!
Technologies Used
Python 3.x
Matplotlib for visualization
Git/GitHub for version control
Github Link
https://github.com/adityaamitra/Smart_Room_Cleaning_Agent